Introducción
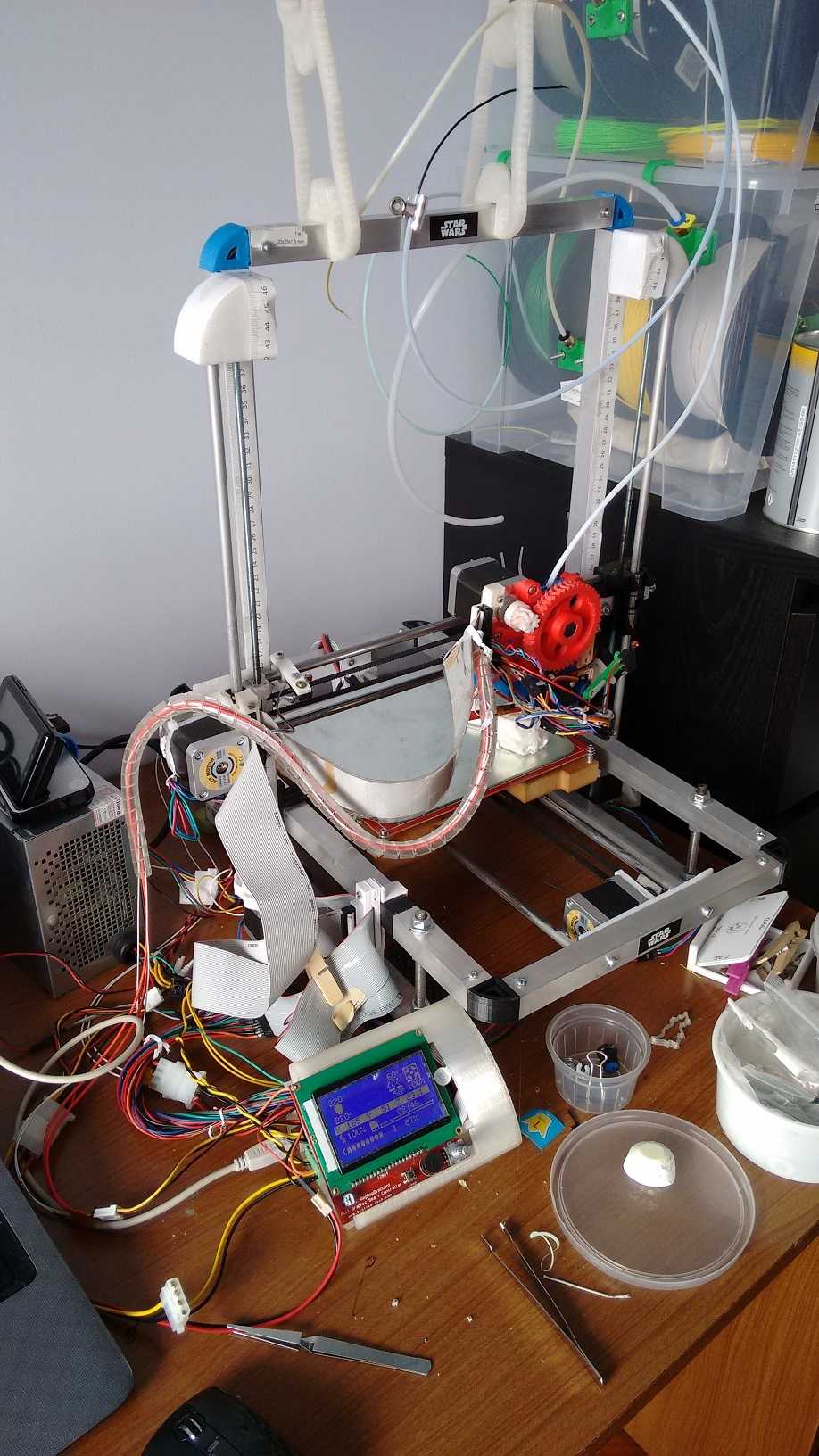
El proyecto consiste en el diseño y construcción de una impresora 3D modular.
Inicialmente está basada en la impresora Teebot Max a la que he añadido ideas y conceptos de otras impresoras y diseños propios para convertirla en una máquina de fabricación multiusos.
Características y módulos.
Definición de un estándar de cableado y conexión
Mediante la definición de un estándar de cableado y conexión a la electrónica conseguimos:
- reutilizar la electrónica para varias impresoras
- sustituirla rápidamente en caso de que falle
- transportar la máquina fácilmente
Características del cableado
Con este estándar de cableado podemos desconectar rápidamente el marco XZ de la Teebot Max para transportarla fácilmente o para realizar mantenimiento sin necesidad de desconectar todos los componentes electrónicos.
Reutilización y reciclaje
Usando un cable plano de 34 hilos, unimos las conexiones de todos los componentes desde el extrusor hasta la electrónica.
El cable plano lo podemos reciclar de las viejas disqueteras ya que es lo suficientemente largo e incluye varios conectores donde podemos enchufar directamente la electrónica y todos los componentes.
Precisión y seguridad
En el diseño original pensaba incluir en la cinta plana los cables de los sensores de temperatura, pero es posible que la resistencia interna de la cinta plana pudiera influir en las medidas de temperatura así que el cableado de los calentadores y los sensores de temperatura van directos a un conector de 4 pines que mediante un cable corto va directamente conectado a la electrónica.
También descarté usar la cinta plana para llevar la alimentación de los calefactores de los extrusores y de la cama caliente pues la corriente sería excesiva y se recalentaría demasiado el cable plano.
Estándar

Escalabilidad
En la segunda versión del estándar usaré un cable plano de 40 hilos como los de los antiguos discos duros IDE.
Usando un cable de 40 pines nos permitirá conectar electrónica que maneje hasta 3 motores.
Si ya tenemos montada la versión de 34 pines podremos ampliarla simplemente añadiendo un cable de 4 hilos para el tercer extrusor.
Diseño
He diseñado unas piezas a medida para poder fijar los conectores del cable plano al motor del eje x y al motor del extrusor (inicialmente tenía el extrusor de tipo Greg wade)
De este modo el cable plano puede flexionarse en toda la extensión del eje x.
También he diseñado un soporte para un alargador de la cinta de cable plano de 34 hilos.
Este alargador lleva un conector para la electrónica, un macho para el conector de la cinta del marco XZ y otro conector donde irán los cables de los motores restantes.
Añadidos
- Para favorecer la flexibilidad del cable de cinta plana en el eje X he recortado dos trozos largos del plástico de la caja de un juguete y los he pegado alrededor de la cinta plana.
- Para mejorar la estética y que no queden cables colgando, he pasado los cables de uno de los motores del eje Z a través de los tubos del marco XZ.
Para lo cual he tenido que rediseñar las piezas que unen los tubos introduciendo un hueco que permite pasar los cables sin perjudicar la rigidez de la pieza.
En la primera versión los huecos eran rectos pero era complicado pasar los cables así que volví a rediseñar la pieza para que pasaran los cables haciendo una curva. - También he pasado los cables de final de carrera del eje y a través de uno de los tubos.
Se podrían pasar por el mismo tubo, los cables de la cama calefactable y el sensor de temperatura de la cama aunque luego sería complicado retirarlos una puestos los conectores.
Soporte modular de extrusor
Soporte de cambio rápido para cualquier extrusor compatible con la prusa i3
Extrusor doble modular
De tipo bowden con acople para sonda de autonivelado.
Se puede utilizar la electrónica de la RAMPS 1.4 pues permite hasta 2 extrusores
En este caso se puede colocar un interruptor para encender el ventilador de capa de modo manual.
Extrusor triple
Cabezal Diamond: extrusor triple de tipo bowden que mezcla 3 filamentos distintos de plástico permitiendo imprimir cualquier color a partir de los 3 básicos (rojo, verde y azul) o mezclar tipos de plástico distintos como rígido o flexible.
En este caso es necesario usar electrónica distinta de la RAMPS 1.4 pues solo admite 2 extrusores.
Yo he usado la controladora RUMBA que también integra el Arduino y permite hasta 3 extrusores.
Plotter (traza líneas con un rotulador)
Permite escribir y dibujar en la ropa, papel, piezas de plástico, vidrio. De momento solo en superficies planas.
También puede dibujar pistas de circuitos impresos con un rotulador conductivo especial
Ideas y proyectos para el futuro:
Grabadora láser
CNC con dremel
CNC 4 ó 5 ejes
Extrusora de pasta
Base fijadora por succión de aire
Fijación de ropa
Construcción
Para construir la base de la impresora he seguido el estupendo manual en PDF que hay en:
https://github.com/EmmanuelAdetutu/TeeBotMax
He usado otra caja para la RAMPS y tampoco he usado el extrusor Teestruder pues ya tenía el extrusor de Greg’s Wade modificado por Xoan https://github.com/xoan/jonaskuehling-gregs-wade-i3
Resultado